Blog # 2
This past week, the team met with the robotics engineers and NDT Subject Matter Expert (SME) at DOW Chemical to introduce ourselves and get more clarity on stakeholder needs. They looked over the quantifiable measurements, but wanted to include another physical requirement for the attachments: being able to spray dye penetrant on welded seams, which occur at various curvatures. Based on that added scope, we have refined our technical problem statement with the following physical constraints:
Statement of the Goal
The goal of the project is for a robotic arm attachment to perform dye penetrant testing by executing a 3 step procedure: apply water-washable dye penetrant thoroughly to cracks or weld seams, rinse with water pressure less than 30 psi at a distance of 6-12 inches from the surface, and wiping excess penetrant without removing the penetrant from the crack.
The length, width, and height of the robot being under 10 inches, the real estate for arm design is limited causing challenges to mechanisms involved. These mechanisms include the tube size, water pump design contraption allocation within the robot, requiring robust power supply to support all tasks, and storage tanks for fluids. Furthermore, due to the size of the robot, the required maintenance and updates will cause wear and tear to the components which will reduce the lifespan. The maintenance of the robot which consists of taking apart the tubes, electronics, and other mechanisms introduces areas for error. The water spray mechanism requiring the tube to be 70’ requires a considerable amount of pump power. Maintaining constant flow rate to push liquid across the 70’ tube and at various angles needs a sensing system that communicates with the pump to change the power accordingly.
The team's technical analysis plan to develop the conceptual design includes reviewing the different mechanisms, design processes, and material to complete the 3 tasks. With the new scopes, we have a better idea how to create and modify our CAD designs accordingly. The design itself will still take in account the previous physical challenges listed. However, the team will now do a fluid analysis regarding how the fluid will be sprayed at both a certain height and variable angle. Given the arm will perform at a notably different angle, it is vital to perform a more thorough FEA analysis on the material structures’ critical points. The design of the arm must be able to maneuver at different angles in order to compensate for curved surfaces.
One soft challenge the team will face is keeping effective collaboration amongst the engineering group at Dow Chemical. The team must make sure we meet our goals while still fulfilling their requirements and staying on schedule with monthly progress reports. The design has to be user friendly since the BIKE Robot is controlled separately and we have to ensure seamless transition between both interfaces. This involves being able to properly instruct the appropriate personnel on how to configure the controls and perform the tasks with minimal errors. For those reasons, the team has to focus on making the design as intuitive as possible.
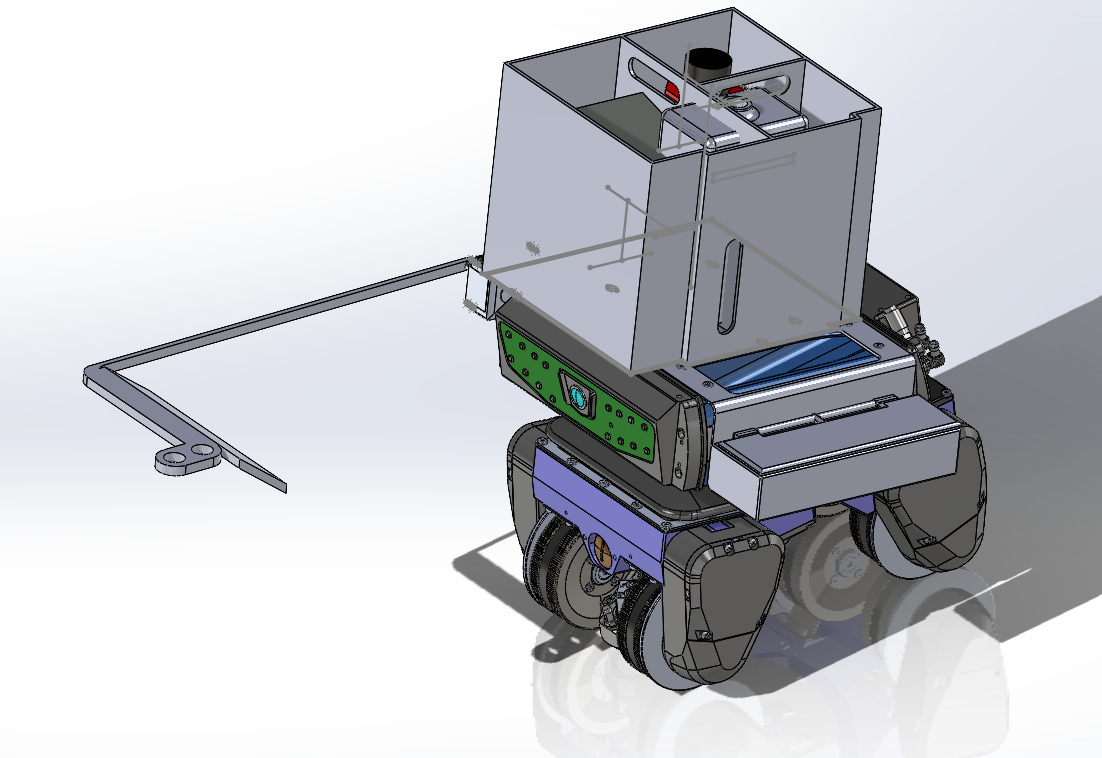
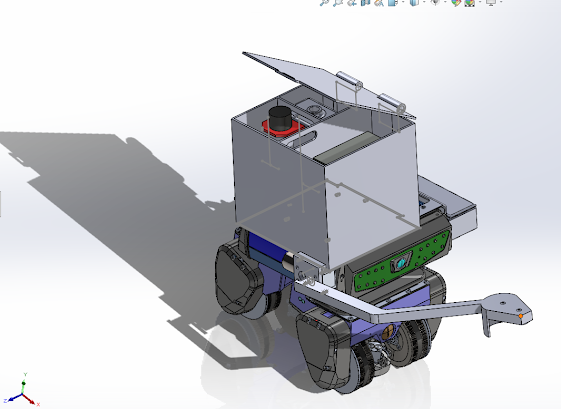
The following figures below are to illustrate and further expand on the scopes of our project. Based on the needs of the operators, they would also like to apply dye penetrant on welded seams at various angles. These are usually the most vulnerable spots and require further examination.

Figure 1: Example of Welded Seam

Figure 2: Dye Penetrant Testing on Sample Pipe’s Weld

Comments
Post a Comment