Blog #1
Dye penetrant testing is a non destructive testing method used to identify surface defects in several materials which is generally safe but has some dangers associated with the task. Some of the dangers include chemical exposure, skin and eye irritation, inhalation risks, fire hazards, risk when operating on tall structures. Due to many of these concerns and possible human error factors, the implementation of a dye penetrating robot removes such risks whilst improving performance and increasing versatility.
Team Apex will be designing specialized arm attachments for an existing robot platform owned by a third party chemical company, requiring dye penetrant testing for critical assets within chemical plants, such as tanks and distillation columns. These structures are about 70-80 feet high, which has fluid dynamic influences for pumps and nozzles involved. The arms have to perform three physical functions adequately: dye application, rinse with water, and wipe thoroughly to detect any surface flaws. The team will need to create or procure parts that fit the robot’s dimensions (9.5’ L x 7.5’ W x 8.5’ H) and existing screw holes. Materials will have to both support the tasks and operate properly under industrial standards. Other constraints include absence of frayed or loose wires, minimal signal interference with electronics, following fire safety code with enclosed equipment, running cables along the robot’s 100 foot tether, and time. Ultimately, the team will be able to test prototypes on a roughly 70 square foot metal plate at the company’s lab.
The first design obstacle is optimizing the arms maneuverability. Since the robot drives along various, metal surfaces, the arms must be able to twist at different angles. In addition, a problem the team may encounter is developing the code, which is dependent on the complexity of the arm design. Materials for the arms and tubes are important as they will control the flow of the dye penetrant and other constraints, such as the robot’s real estate and max payload.
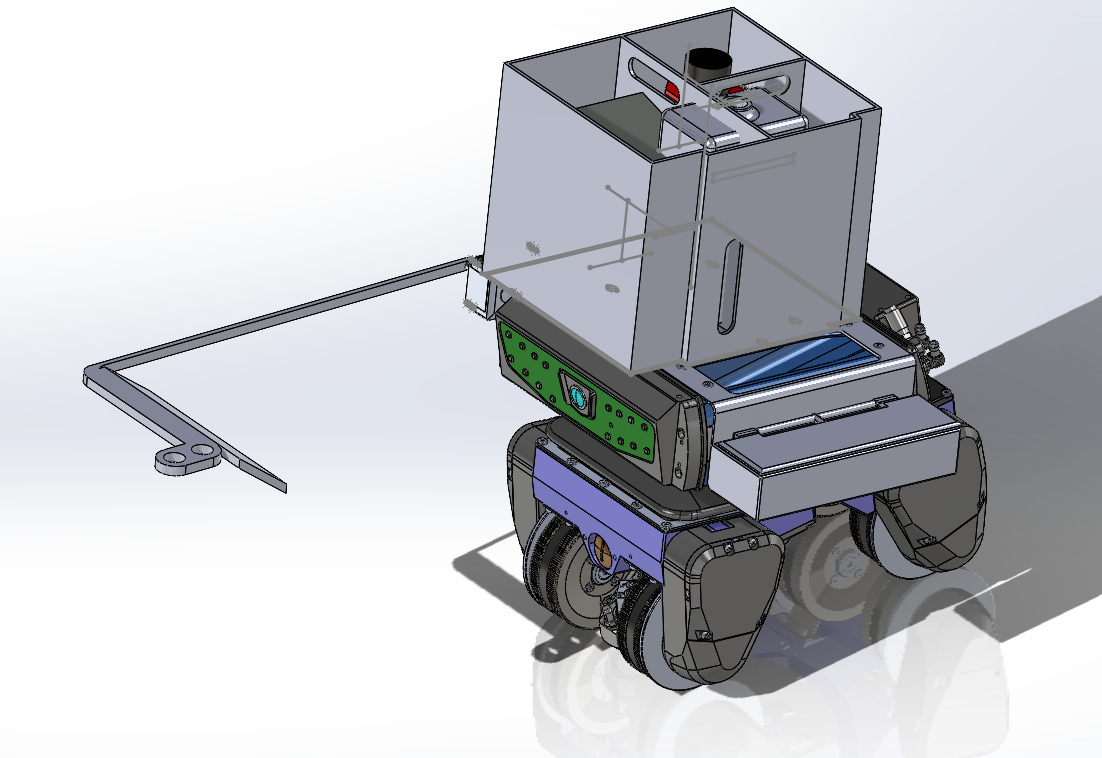
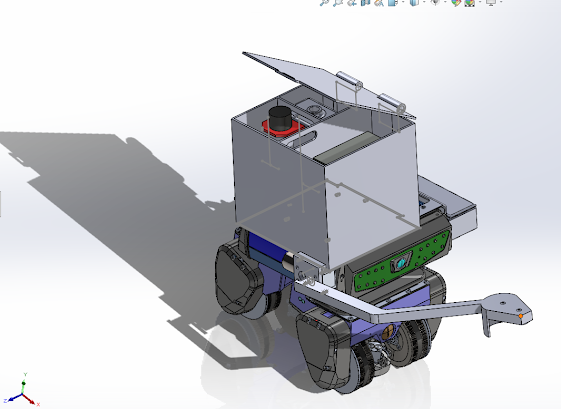
The following images pertain to the dye penetrant project discussed. The first figure is of Waygate’s BIKE platform. It has 4” magnetic wheels which allows it to travel on metal surfaces. These wheels have a lot of grip which will allow the team to attach different parts to it as necessary. The second figure addresses the scope of the project and what actions it needs to perform for a successful test.

Figure 1: Waygate BIKE Platform
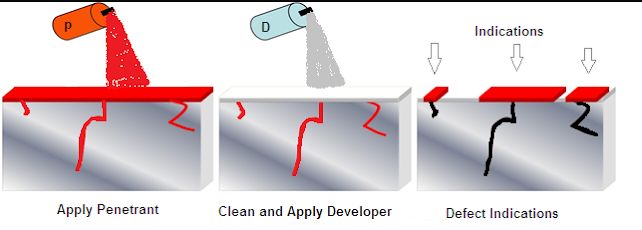
Figure 2: Dye Penetrant testing

Comments
Post a Comment