Blog #8

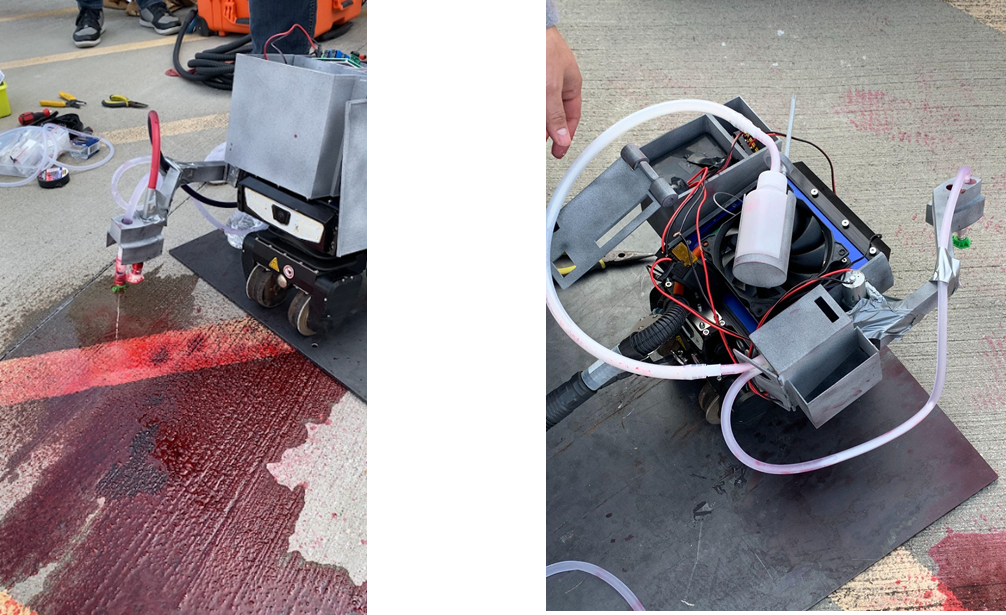
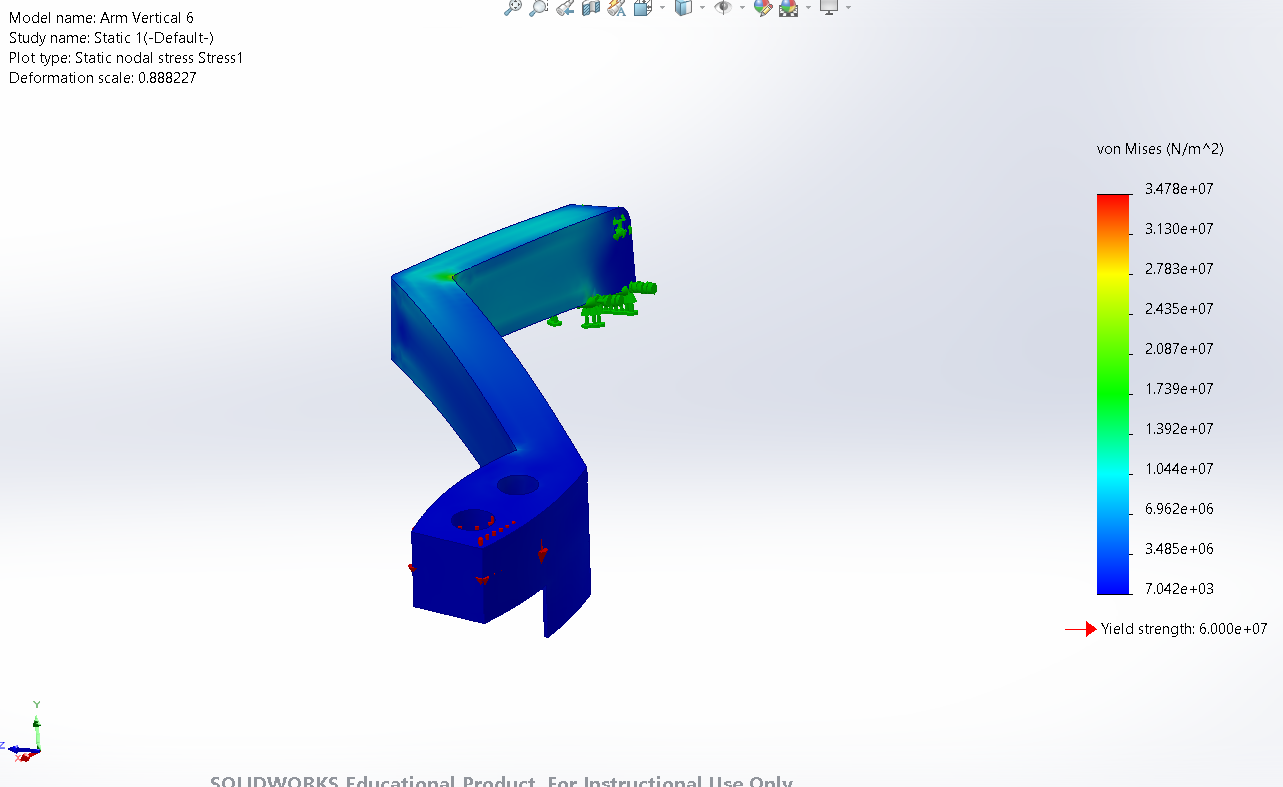
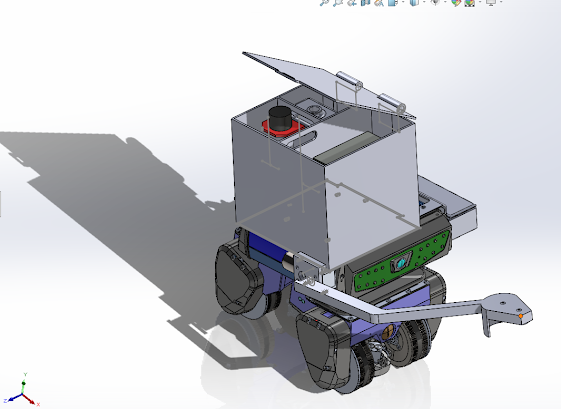
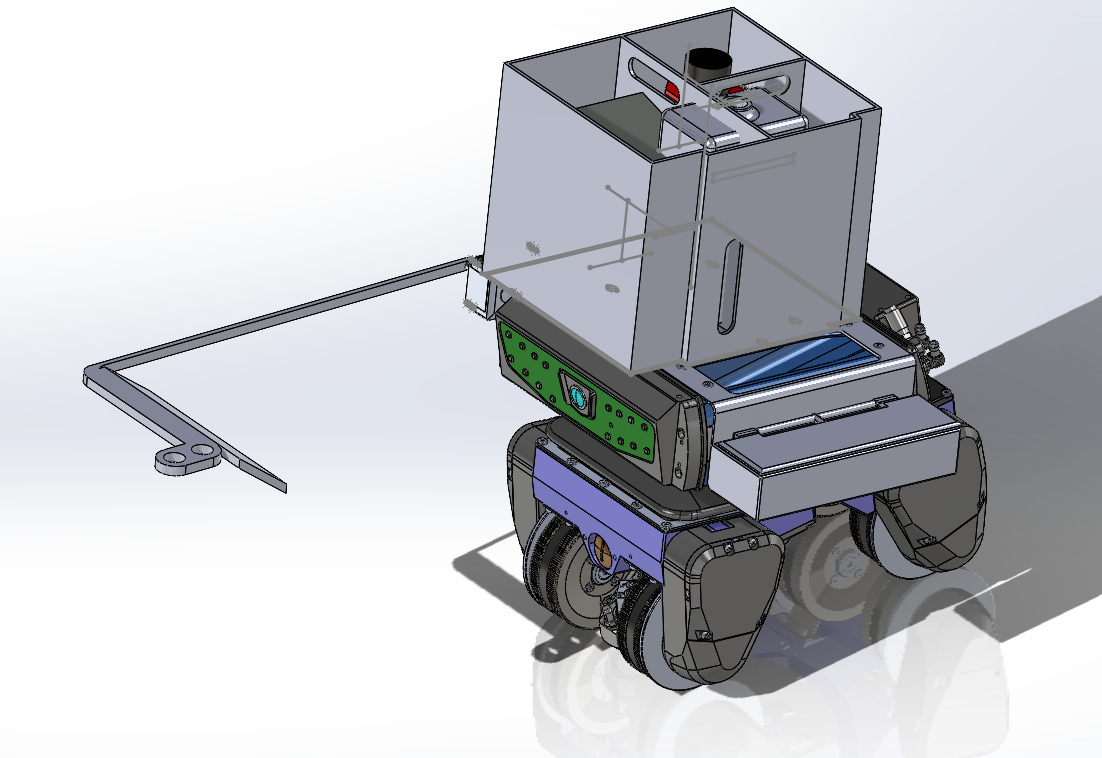
Over the period of March 23-April 13th, the team has made progress in getting the final fabricated items and test fitting the components to the BIKE robot. Having success with the assembly, the team did several test runs with the sponsor company on demo day to ensure that the proposed project results were achievable. The demo test also revealed areas that could improve, especially in regards to the developer option attachment. The team did further validation on the pressure of the fluid exiting the pump, strain gauge, and load cell testing. For validation, the team conducted a new pressure gauge test with a custom made fitting that attaches directly to the peristaltic pump. This fitting allows for direct connection between the pressure gauge and a 10mm tube. The custom piece was made to remove the 7mm to 10mm adapter that was initially needed and thus confirm any differences in test data. Upon several runs with the pressure gauge testing, the data revealed the same results as the ones ...